Or: How I spent way too much time automating something I could do in 30 seconds with a watering can
What Even Is This
I built a plant watering system. Microcontroller reads soil moisture, sends data to my server, I get Telegram messages when my plants are dying. I can water them remotely with a button.
The twist: Rust all the way down. Firmware on a $6 chip with no OS? Rust. Backend with PostgreSQL and Telegram bot? Also Rust.
Spoiler: I shared almost zero code between them. That wasn’t the point.

The Setup
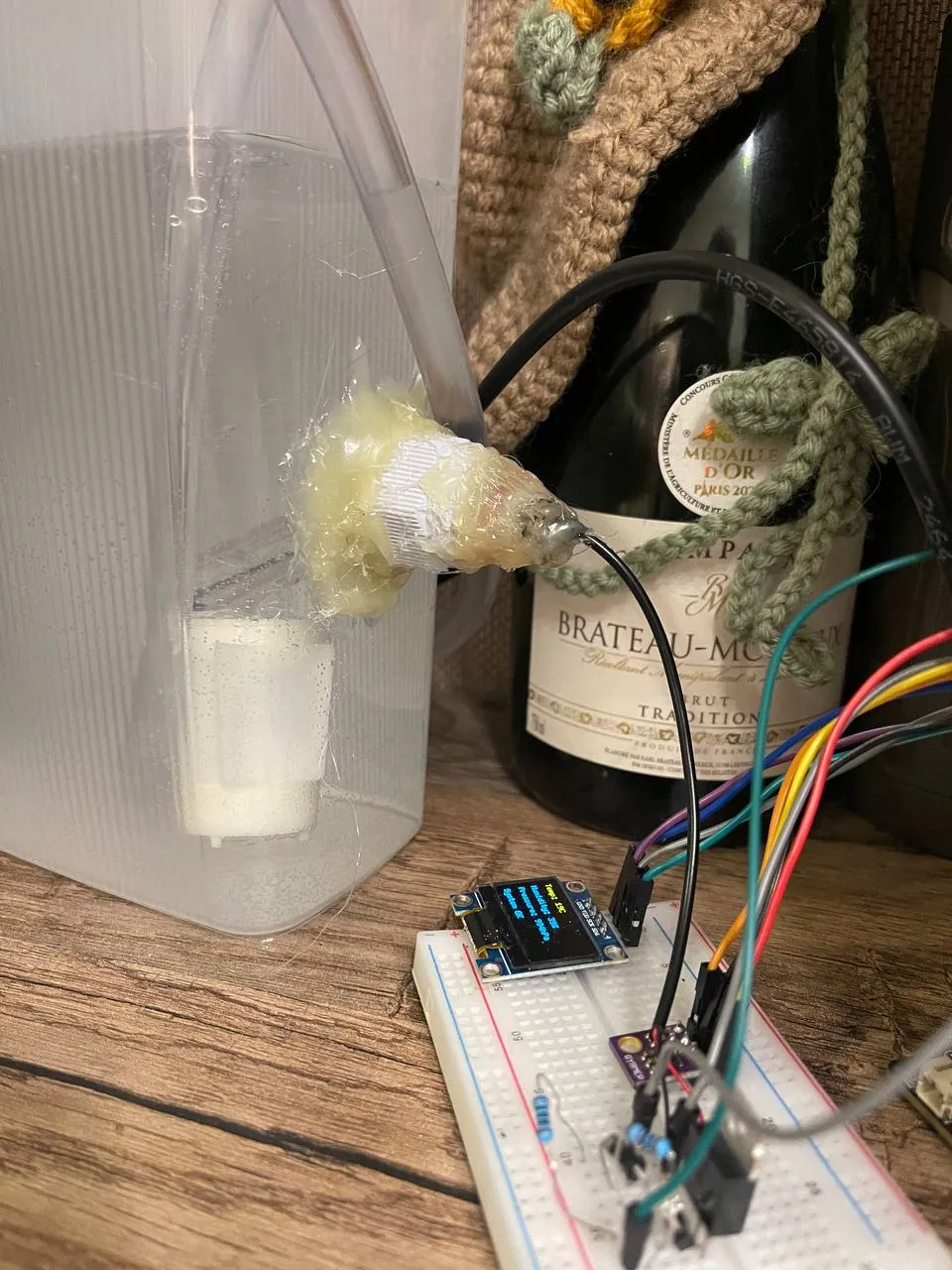
Raspberry Pi Pico 2 W - 150MHz, 512KB RAM, no OS.
Connected: BME280 (temp/humidity/pressure), soil moisture sensor, OLED display, water pump, and an ultrasonic sensor for water level that I never got working and probably never will.
┌───────────────────────────────────────┐
│ Pico 2 W (Rust) │
│ BME280 + Soil Sensor + OLED + Pump │
└─────────────────┬─────────────────────┘
│
POST /sensor │ GET /tasks
(temp, humidity, soil) │ (pump commands)
│ │ ▲
▼ │ │
┌─────────────────▼───────────────┴─┐
│ VPS (Rust) │
│ Axum → PostgreSQL → Teloxide │
└─────────────────┬─────────────────┘
│
LISTEN/NOTIFY │ Alerts + Controls
▼
┌───────────┐
│ Telegram │
│ Bot │
└───────────┘
│
▼
My Phone
"Water the plant"”How Hard Can It Be?”
Famous last words.
The Rust embedded ecosystem has Embassy - an async runtime for microcontrollers. Write async/await on bare metal, multiple concurrent tasks on a single-core chip. The pitch was too good.
This thing is amazing. I’m always surprised how good the Rust community is at developer tools and libraries.

The architecture is basically actors - independent tasks talking through channels:
// Capacity 1: only latest reading matters, old data gets dropped
static SENSOR_CHANNEL: Channel<CriticalSectionRawMutex, SensorData, 1> = Channel::new();
// Capacity 4: buffer HTTP requests when network is slow
static HTTP_CHANNEL: Channel<CriticalSectionRawMutex, HttpRequest, 4> = Channel::new();
// Capacity 1: only latest pump command matters
static PUMP_CHANNEL: Channel<CriticalSectionRawMutex, PumpCommand, 1> = Channel::new();Each task does one thing:
#[embassy_executor::task]
async fn sensor_task(i2c_bus: &'static I2cBus) {
loop {
let data = read_sensors(i2c_bus).await;
SENSOR_CHANNEL.send(data).await;
Timer::after_secs(60).await;
}
}Sensor task reads, display task renders, network task sends, pump task waters. They don’t know about each other - just channels. If you’ve done actor systems or used Tokio channels, this is familiar. That’s the point.
First milestone: blink an LED. It worked.
Reality Check
Then I tried to initialize WiFi.
let (net_device, mut control, runner) = cyw43::new(state, pwr, spi, fw).await;The code compiled. The device did nothing. No LED, no logs. Just silence.
Three Days in GitHub Issues
I tried everything. Different Embassy versions. Secure boot configs. Staring at the code hoping it would fix itself.
Finally, buried in a GitHub issue: the RP2350 runs at 150MHz, not 133MHz like the RP2040. This breaks PIO timing for SPI communication.
The fix was a magic number that took three days to find:
// This constant represents mass of time consumed debugging
const PICO2W_CLOCK_DIVIDER: FixedU32<U8> = FixedU32::from_bits(0x0300);The other part was recently broken WiFi drivers, so I had to roll back and pin to working commits. It’s hard to be a pioneer. But I’m not really one - those who write these drivers are the ones who rock.
The TLS Situation
My server is behind Cloudflare. No HTTPS, no connection. I used reqwless with embedded-tls.
let mut tls_read_buffer = [0u8; 16640];
let mut tls_write_buffer = [0u8; 16640];33KB just for TLS buffers. 6% of my total RAM for one HTTPS connection.
It worked. Barely, but it worked.
Yes, I know MQTT exists. Yes, I know a home server with a broker would skip TLS on microcontroller entirely. That’s the plan for version 2: add more infrastructure to water a plant. The solution to overengineering is always more engineering.
The Backend (The Easy Part)
After embedded suffering, Rust on a server felt like cheating. Axum, SQLx, Teloxide - the whole thing came together in a weekend.
The interesting bits:
Real-time processing without polling - PostgreSQL LISTEN/NOTIFY wakes up my code only when new data arrives:
let mut listener = PgListener::connect_with(&pool).await?;
listener.listen("sensor_data").await?;
loop {
let notification = listener.recv().await?;
process_sensor_data(notification.payload()).await?;
}Power outage detection - sensor reports every 60 seconds, so silence means trouble. The Pico doesn’t send a “dying gasp” - it just stops. A background task on the backend checks last_reading every two minutes:
let elapsed = (now - last_reading).whole_seconds();
if elapsed > 150 && !active_outage {
db.start_outage().await?;
alerter.broadcast("Power outage detected!").await?;
}Detecting absence is philosophically weird - you’re looking for something that isn’t there. The system knows power is off because it knows when it isn’t. The missile guidance approach to plant care.
The Moment It All Connected
First time I saw this in my database:
{"temperature": 23.5, "humidity": 45.2, "pressure": 1013.25, "soil_moisture": 67}…sent from a chip the size of my thumb, through WiFi, through Cloudflare, into PostgreSQL - I screenshot everything. Sent it to friends who definitely didn’t care but pretended to.
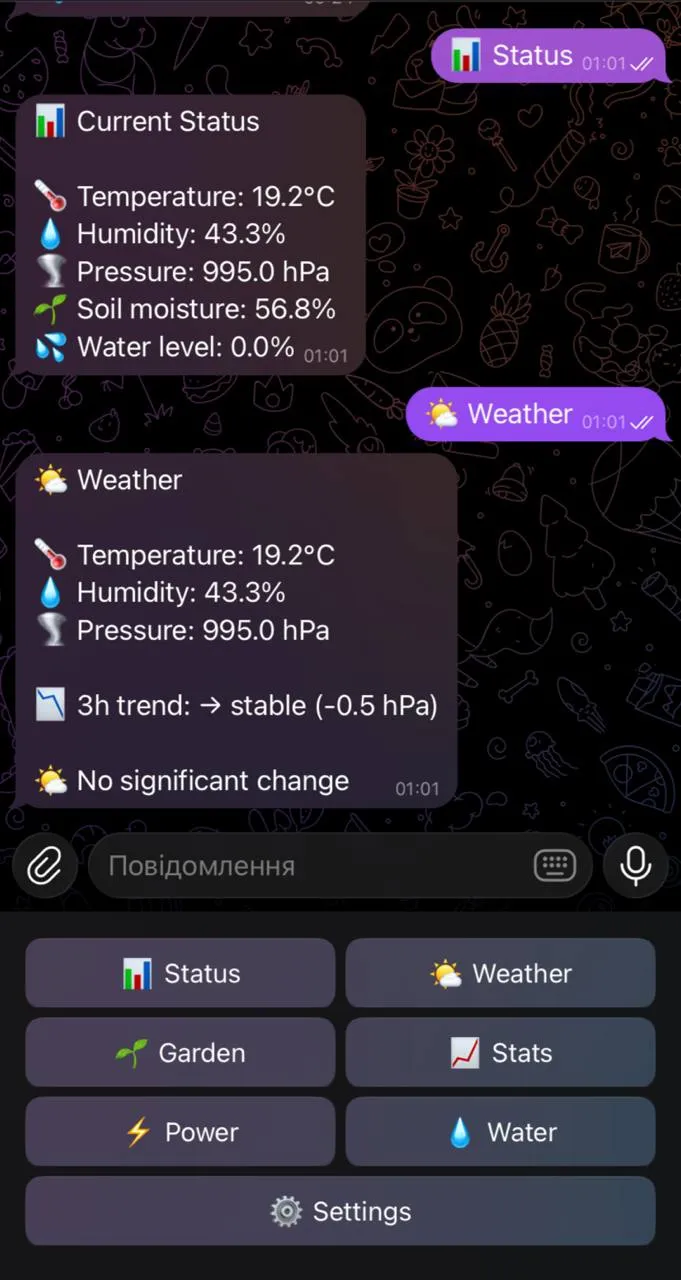
First Telegram notification while away from home:
Soil moisture is low (28%). Consider watering.
What “Full Stack Rust” Actually Means
I expected shared code between firmware and backend. Common types, validation logic.
Reality: almost zero shared code.
But Embassy and Tokio feel almost identical:
| Embedded (Embassy) | Backend (Tokio) |
|---|---|
#[embassy_executor::task] | #[tokio::main] |
Timer::after_secs(30).await | sleep(Duration::from_secs(30)).await |
CHANNEL.send(data).await | tx.send(data).await |
spawner.spawn(task()) | tokio::spawn(task()) |
Same patterns. Same intuition. Different worlds. The cognitive load of switching is near zero. When I changed a struct on the backend and forgot the firmware, SQLx’s compile-time checks caught it.
That’s what “full stack” actually gave me - not shared code, but shared mental model.
Hindsight
What Rust gave me: Confidence. If it compiles, it probably works. Same tooling everywhere. Fearless concurrency on both ends.
What it cost: Compile times. Ecosystem churn (Embassy moves faster than its docs). The embedded learning curve is real - no_std is a different world. But Embassy is magic, giving a dumb web developer like me the ability to write bare metal code. One of the best feelings I’ve ever had.
What I’d do differently: Use MQTT. (No) Add OTA updates. (Maybe) Fix the ultrasonic sensor. (Or just admit I never will)
Was It Worth It?
My plants now have better monitoring than most production systems I’ve worked on. Real-time data in PostgreSQL, alerting with quiet hours, power outage detection, remote control via Telegram.
Total cost: ~$20 in hardware, mass(time). The plants are alive. That’s more than I can say for my previous attempts at gardening.
All because I wanted to water my plants from my phone without getting up.
Is it overkill? Obviously.
Would I do it again? Already planning version 2.
(For future employers reading this: Am I prone to overengineering? Obviously not. This is a perfectly reasonable amount of infrastructure for watering a plant.)
The code is on GitHub if you want to steal ideas or judge my life choices: firmware and backend. Just don’t blame me if your plants die anyway - I’m a software developer, not a botanist.